
The Safe Bet
The tools for a safer ride are already within reach: Utilizing current high-fidelity sensors and intelligent software to actively mitigate road risks in real-time.

Introduction
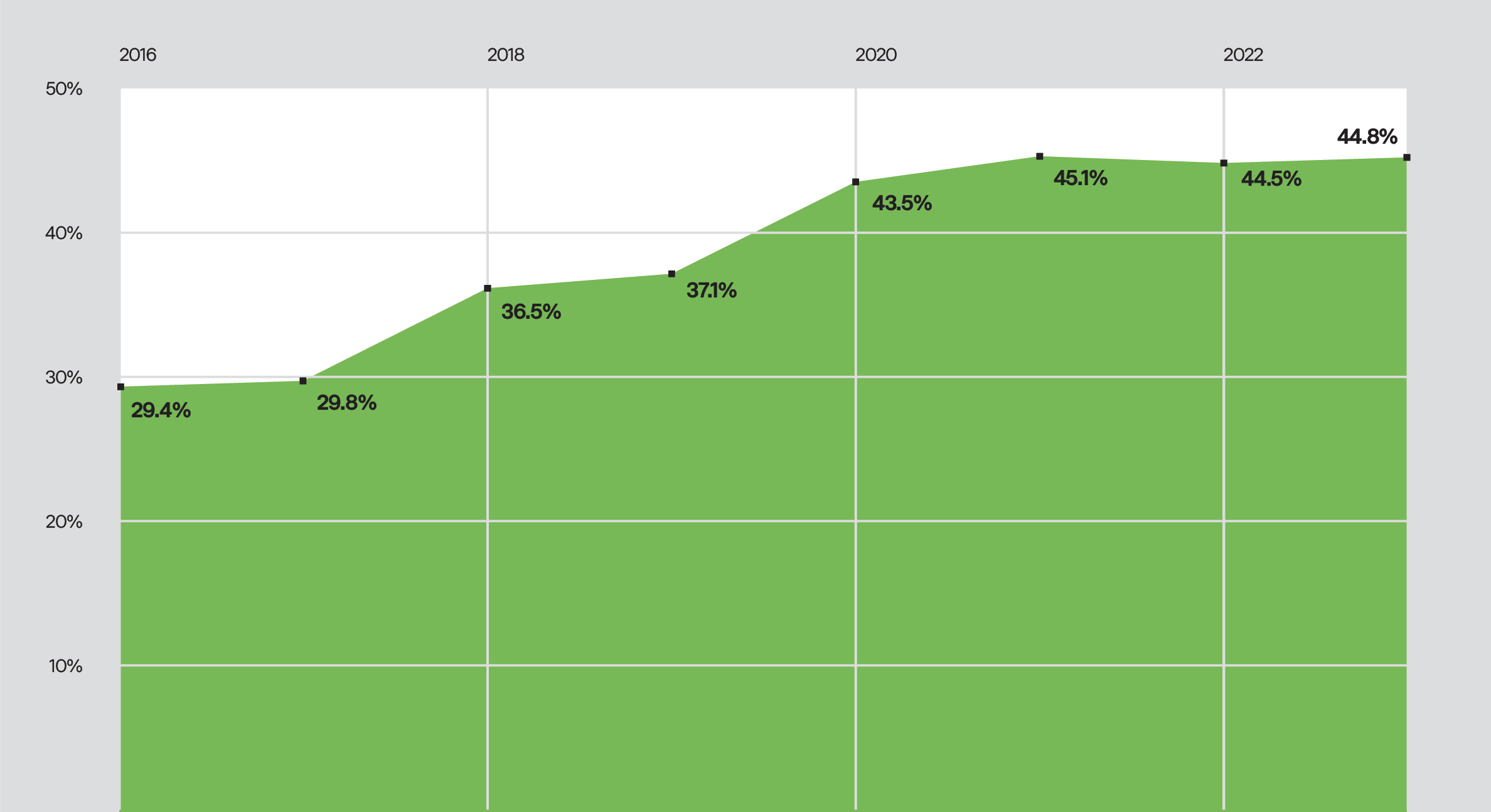
India has over 260 million registered two-wheelers, making its roads one of the world’s most intense mobility hubs. The share of two-wheelers that are 124cc and higher is greater than 50% for both scooters and motorbikes today1. As vehicle volume and power levels increase, the margin for error shrinks. According to the MoRTH Road accidents Report 20232, two-wheeler accidents fatalities as a percentage of total road fatalities jumped from 29.4% to 44.8% over the last decade. While the overall road accidents in India have begun to stabilize, the two-wheeler segment remains vulnerable.
Electrification offers an opportunity to solve this problem. Unlike traditional petrol engines that rely largely on mechanical hardware, electric scooters come equipped with more computing power by virtue of their powertrain. A typical E2W has at least 4 microprocessors. The same high-frequency data processing that allows an electric scooter to hit 40 km/h in 2.9 seconds also allows it to detect and recover from a slide during a monsoon in 0.1 seconds. Electric opens up new possibilities for 2W safety.
While possibilities exist, introducing new safety tech faces two major hurdles: cost addition and a lack of regulation. On one hand, integrating these features requires considerable Research and Development (R&D) and an increase in the Bill of Materials cost of the vehicle which can drive up vehicle prices. On the other hand, the absence of a clear standards framework leaves the industry without a clear implementation path. The answer hence is not just technology development but also standards development which can then open a pathway to adoption of these technologies.
The anatomy of a crash
Vehicle crashes are rarely the result of a single failure. Instead, they follow the “Swiss Cheese Model” of accident causation. Imagine several slices of cheese stacked together; each slice represents a layer of defence– human behavior, protective gear, road infrastructure, and vehicle safety. An accident only occurs when the “holes” in every layer align perfectly to create a trajectory for disaster.
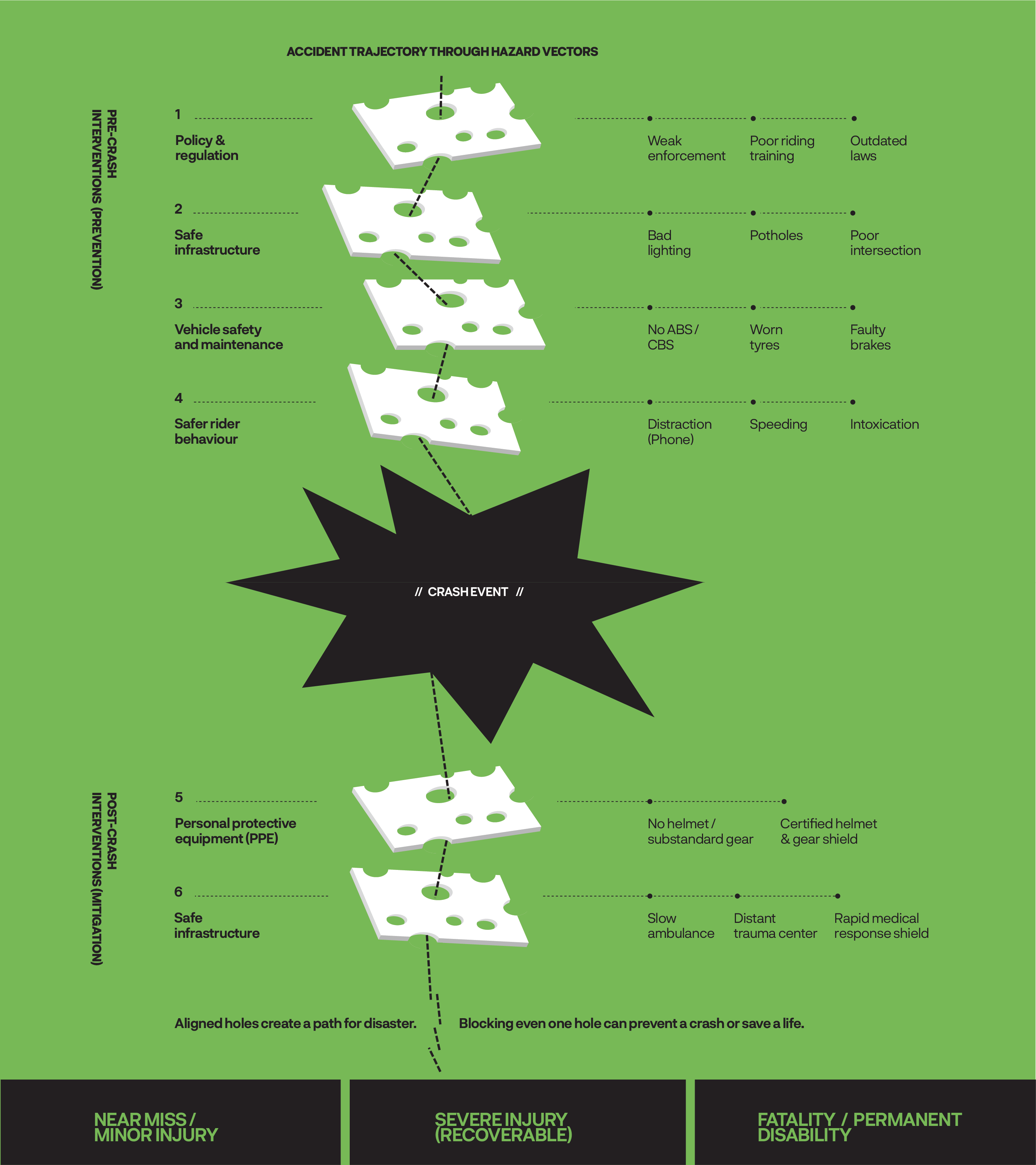
A crash occurs when the holes in these first four layers align. For example, a rider on a bike with poor brakes (Layer 3 hole) is speeding (Layer 4 hole) on a poorly lit road (Layer 2 hole) and a policeman is not present to deter them (Layer 1 hole), leading to a collision with a car that didn’t see them.
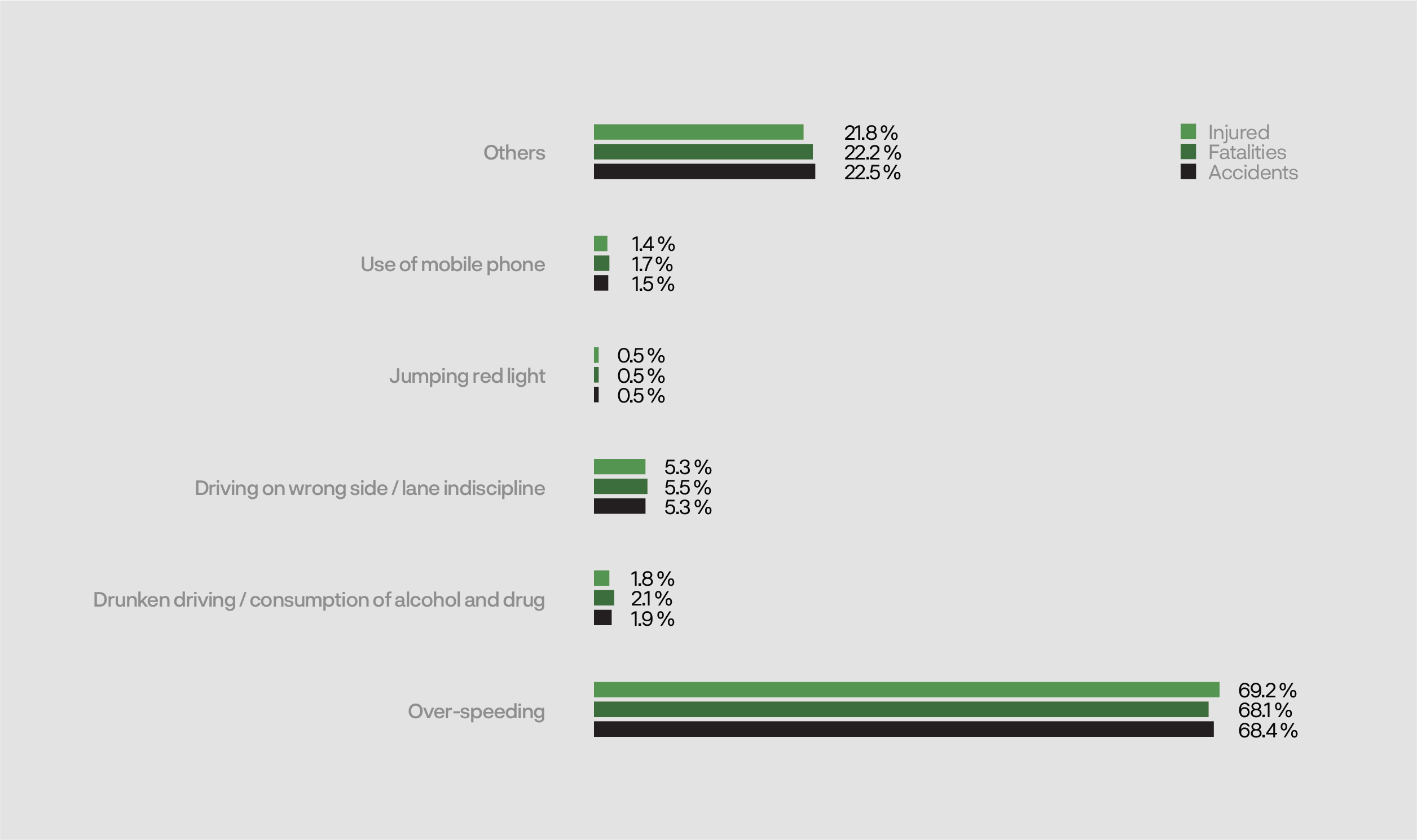
According to MORTH Road Accidents Report 20232, the two largest “holes” in our current system are overspeeding and non-usage of helmets. Speeding alone accounted for a staggering 68.1% of all road fatalities, while over 50,000 riders lost their lives simply because they weren’t wearing a helmet.
Beyond the machine, rider skill serves as an essential filter in the Swiss Cheese Model of crash prevention. Adapting your inputs, like choosing whether to favor the front or rear brake, depends on a constantly shifting mix of real-time variables. Road conditions like wet tarmac or dry asphalt, your current speed, and your required stopping distance all dictate that split-second decision. While the scooter's hardware provides a strong foundation for safety, it is the rider's skill and situational awareness that ultimately determine whether that potential is realized.
Technical Intervention
Vehicle safety and maintenance
A well-functioning vehicle is a prerequisite to a safe riding experience. All two wheelers come equipped with basic safety equipment such as front and rear lamps, brakes, CBS (Combi Brake System), reflectors, side stand sensors, indicators and rear view mirrors. Proper functioning and presence of these elements is an important driver of safety outcomes. Technical intervention in the event of malfunction or removal of critical systems is possible. For instance it is quite simple to sense a malfunctioning lamp. Tyre pressure monitoring and brake pad wear detection technology is widely available today but can be expensive. Rear view mirror removal is also possible to sense using a simple circuit. In EVs, sensors monitor critical components such as batteries and motors and already take real-time decisions in the event of a malfunction.
To detect component removals or failures, the scooter is capable of utilizing current sensing via shunt resistors on the low-voltage harness to monitor the precise electrical load of peripherals like lamps. Any deviation in the expected milliampere draw could be instantly flagged as a load drop by the Vehicle Control Unit, triggering a diagnostic alert on the dashboard that can be further escalated through haptic feedback and powertrain restrictions.
The human filter
Beyond vehicle hardware, safety also depends on rider behavior. Interventions in this layer aim to reduce negligence such as helmet non-usage and the use of substandard gear, which often stems from the perceived inconvenience of heat, bulkiness, or restricted movement. This is compounded by intentional risks like speeding, wrong-lane riding, and reckless maneuvers.
To mitigate these human-centric risks, the scooter could utilize multi-modal sensors to monitor both rider behavior and environmental interactions in real-time. Rider-facing camera systems employ computer vision for standard helmet and fatigue detection, ensuring that riders aren’t just wearing any headgear, but specifically standard-compliant equipment. Simultaneously an integrated 6-axis Inertial Measurement Unit (IMU) tracks linear acceleration and angular velocity across three dimensions. These motion dynamics could be analyzed by the micro-controllers to instantly flag reckless riding patterns, such as aggressive cornering or erratic maneuvers. By utilizing these inputs, the vehicle can actively prompt better riding habits and step in when human error compromises safety.
Infrastructure and environment gaps
Beyond behavioral monitoring, the vehicle must navigate environmental variables where safety is dictated by the road surface and surrounding traffic. On roads compromised by rain, sand, or oil, the physical grip between the tire and the ground is reduced, narrowing the margin for error. Separate from these mechanical limits are the risks of front and rear collisions from surrounding traffic, as well as the threat of spatial blindness, where blind spots exceed a rider’s natural field of vision. To maintain stability in these situations, modern EVs are already equipped with traction control and electronic braking systems which utilize IMUs and motor torque modulation to detect and correct wheel-spin or wheel-lock almost instantaneously
To manage these dynamics, a traction control system utilizes a hall-effect sensor and a toner ring on the front wheel to provide velocity tracking, while rear-wheel speed is sensed via high-resolution encoder data from the motor. The Vehicle Control Unit (VCU) continuously cross-references these data streams to calculate slip ratios. During acceleration, any spike in rear-wheel speed relative to the front triggers an immediate modulation of motor torque to restore traction before a slip can initiate. This same computational logic governs the Electronic Braking System (EBS). By identifying discrepancies between rear wheel speed and the vehicle’s calculated ground speed, the system detects an impending wheel-lockup. The VCU then dynamically adjusts the motor’s counter-torque, providing a digital buffer against wheel lock-up and skidding. Beyond these mechanical limits, the scooter could address spatial blindness through an integrated high-resolution camera and long-range RADAR architecture. The onboard compute module processes data from the sensor to identify threats in the front, rear, and blind spots. The architecture then allows for the translation of these detections into haptic or visual alerts, effectively compensating for the rider’s natural visual limitations.
Post-Crash action
When an accident becomes unavoidable, a scooter’s role shifts from prevention to survival. This final layer of safety focuses on the “Golden Hour”—that critical window where the speed of medical intervention directly dictates the chances of recovery. At this stage, the primary concerns are rider incapacitation and secondary mechanical hazards. For example, a bystander attempting to lift a downed vehicle might inadvertently engage the throttle, leading to further injury. More critically, if a rider is rendered unconscious or stranded in a secluded area, they are physically unable to call for help. To bridge this gap, modern onboard sensors are designed to detect a crash automatically, and alert emergency responders when the rider cannot.
To manage these risks, the system uses high-frequency data from the onboard IMU sensors to monitor G-forces and the bike’s orientation. If it detects a high-impact event followed by a specific tilt angle, the control unit immediately can cut power to the motor to reduce the risk of any uncontrolled throttle. At the same time, GPS coordinates and incident data can be automatically broadcasted to emergency services and pre-configured contacts. By automating that distress signal, the bike could ensure that even if the rider is unresponsive, the path to help stays open.
Engineering the way forward
Historically, high-level automotive safety has been treated as a premium luxury, gated by the prohibitive costs of fragmented hardware. In a conventional manufacturing setup, implementing features such as ABS, Traction Control, and Fall Detection requires sourcing specialized “Black-Box” Electronic Control Units (ECUs) from multiple Tier-1 suppliers. This modular approach results in a bloated Bill of Materials (BOM), as each individual feature introduces redundant processors, dedicated casings, and complex wiring harnesses—all while incurring external supplier margins and limiting the customization of the user experience.
In contrast, a vertically integrated, software-defined vehicle architecture allows these capabilities to be consolidated onto multipurpose hardware. While many individual features may seem lucrative, the most cost-optimal solution lies in strategic hardware selection: prioritizing high-utility sensors which can execute the maximum number of concurrent features through software logic.
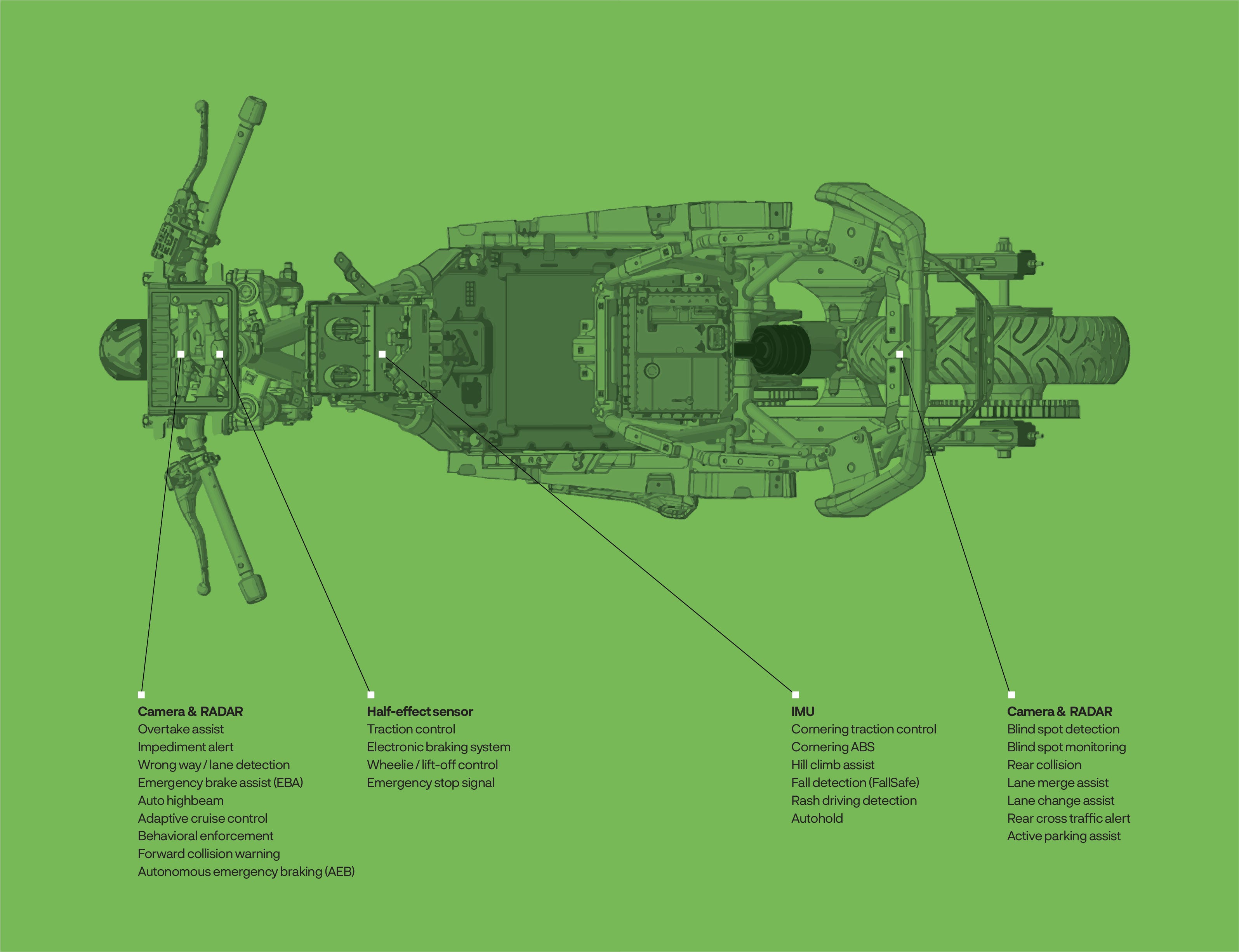
In the following sections, we highlight the specific sensor setups that can be utilized to maximize safety features. These include configurations already implemented by Ather, along with others currently under evaluation. It is important to note that these are representative examples, as different combinations and types of sensors can be used to achieve these same safety results.
Inertial Measurement Unit ( IMU )
The Inertial Measurement Unit (IMU) is the key component driving the development of a vertically integrated safety stack, as it acts as the main source for data related to vehicle dynamics. By combining 3-axis accelerometers and gyroscopes, the IMU continuously tracks linear acceleration and angular velocity to determine the vehicle’s exact orientation in 3D space. The IMU streams high-frequency data to the Vehicle Control Unit (VCU) to recognize event signatures, enabling safety features such as Fall Detection, Wheelie Detection, and Panic Braking alerts. Beyond immediate safety, this sensor provides the foundational telemetry for chassis-level utilities like Auto-hold.
The engineering sophistication of this system lies in its ability to mitigate sensor drift—where minute measurement errors accumulate over time. To maintain absolute precision, the architecture utilizes sensor-fusion algorithms and high-overhead computation to filter out mechanical chassis noise. This ensures a high signal-to-noise ratio, allowing the VCU to execute safety protocols with reliability.
Hall-effect sensor
While the IMU monitors the chassis, hall-effect sensors provide the necessary granularity for wheel-level dynamics. Hall-effect sensors work by detecting changes in a magnetic field; as a magnetized ring attached to the wheel spins past the sensor, it creates tiny electrical signals that translate the physical rotation into a stream of digital pulses. By integrating the hall effect sensor on the front wheel and integrating it with the VCU, the vehicle can execute traction control, wheelie control algorithms and Electronic Braking Systems (EBS) by comparing real-time rotational speeds. In a traditional ICE vehicle, achieving similar safety features like ABS requires a fragmented ecosystem of dedicated sensors, standalone controllers, and heavy hydraulic or pneumatic actuators. In contrast, an EV leverages its native digital architecture to sense wheel slip and modulate motor torque almost instantaneously.
A primary engineering hurdle in this integration is the physical routing to the front wheel, which is a mechanical challenge; the wiring must endure constant steering-induced fatigue and intense vibrations without compromising the interconnects or signal integrity. To ensure these systems are production-ready, the VCU’s logic is subjected to exhaustive real-world validation. This rigorous testing covers critical edge cases—ranging from extreme thermal fluctuations to unpredictable road surfaces—ensuring that traction and braking responses remain deterministic and fail-safe under all operating conditions.
Radar & camera
A dual-sensor approach further expands the safety net: a rider-facing camera monitors safety compliance (such as helmet usage) and rider fatigue, while outward-facing sensors map the environment. This multi-modal system anticipates hazards—such as blind-spot intrusions or potential collisions—before they occur.
Implementing these systems in the two-wheeler segment requires navigating unique dynamics like lean angles and high environmental temperatures that can introduce image noise. To handle the immense computational overhead of real-time computer vision, the dashboard Integrated Circuit (IC) is typically upgraded to more powerful, thermally efficient silicon. This robust hardware foundation allows the system to filter through the chaotic variables of unorganized traffic, ensuring the safety net remains reliable without triggering false positives.
The connected vehicle
Beyond individual performance, the true power of a software-defined scooter is its ability to aggregate data from a fleet-wide sensor array to identify systemic vulnerabilities. By analyzing clustered patterns of sudden braking, IMU-detected vibrations, or frequent traction loss, the Data Layer can precisely mark high-risk hotspots—such as poorly designed junctions or hazardous road surfaces—to map infrastructural gaps in real-time. This intelligence does more than just optimize the vehicle; it provides a data-driven blueprint for urban planners to enhance road safety and infrastructure for all users. Looking ahead, this collective intelligence sets the stage for Vehicle-to-Vehicle (V2V) and Vehicle-to-Everything (V2X) communication, where scooters can broadcast real-time hazard alerts to nearby vehicles and smart infrastructure to prevent collisions or trigger emergency interventions immediately after one occurs.
How can this be standardized?
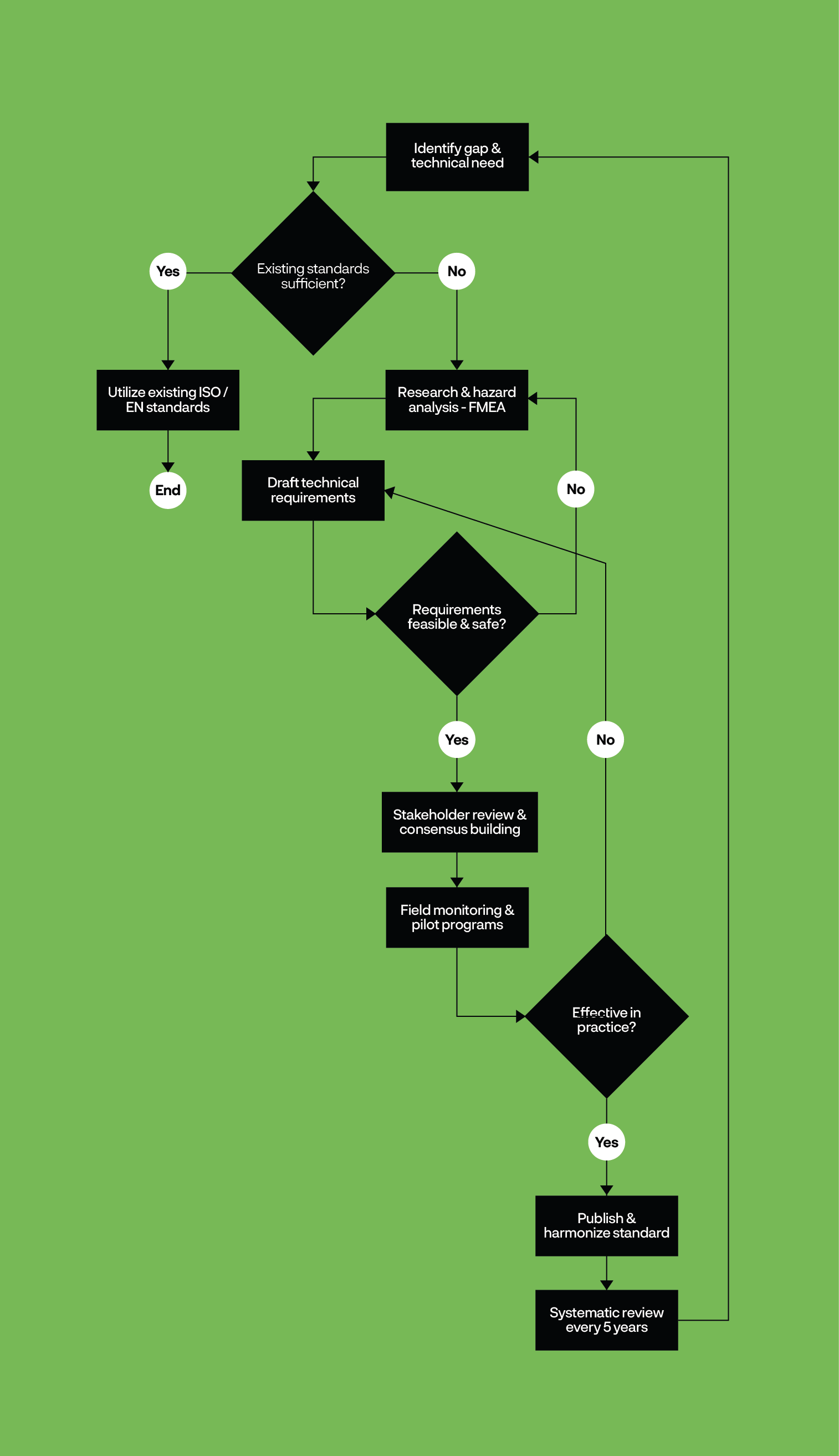
To standardize these emerging automotive technologies, a structured regulatory roadmap is essential to ensure that these safety features move beyond OEM-specific marketing and into verified public benefit. The process begins with formal definition, where industry bodies must establish technical taxonomies for features like ABS or IMU-based fall detection to ensure baseline performance across all manufacturers.
Once defined, the next phase involves retrospective accident analysis and field monitoring to quantify the technology’s real-world effectiveness. By comparing telemetry data against accident rates, regulators can identify potential risks—such as algorithmic bias or sensor latency—and determine if the tech consistently improves rider outcomes, especially in the high-traffic density and unpredictable conditions of Indian roads. If the technology is proven safe and effective, it can be codified into technical standards, providing a blueprint for industry-wide adoption. This iterative cycle of definition, empirical validation, and risk assessment ensures that as the hardware evolves, the safety benchmarks remain rigorous and transparent.
The goal of standardisation shouldn’t be to mandate a list of standalone parts, but to standardise the functional safety outcomes through integrated hardware. Rather than requiring fragmented, expensive ‘black-box’ modules, a more effective roadmap would prioritize high-fidelity, multipurpose sensors (like the IMU or high-res encoders). This allows OEMs to deliver extra safety features through software logic alone—keeping the vehicle cost-effective to build and, more importantly, affordable for the rider.
Conclusion
Sustaining growth in India’s hyper-competitive mobility sector requires a ground-up engineering that integrates safety across four distinct architectural domains. The first domain focuses on vehicle integrity, using current sensing to ensure critical safety components are present and functional. The second domain establishes a foundation of behavioral compliance, using multi-modal sensors to mitigate rider negligence, such as helmet non-usage and overspeeding. The third domain introduces active stability and spatial awareness, where synchronized sensors and motor counter-torques fill infrastructural gaps—eliminating blind spots and recovering traction in sub-second intervals. Finally, the fourth domain manages post-crash response, ensuring the vehicle autonomously initiates distress protocols and alerts emergency services quickly after a crash.
While implementing these features involves significant R&D investment, these costs can be mitigated through vertical integration. By prioritizing multipurpose hardware—like IMUs and high-compute VCUs capable of executing multiple safety functions—OEMs can reduce the Bill of Materials (BOM) without compromising on rider protection. Ultimately, for this ecosystem to thrive, a government-industry partnership is essential. Rather than mandating specific hardware components, standardization should focus on defining functional safety outcomes, allowing OEMs to meet benchmarks through integrated sensor architectures. Establishing these standardized regulatory protocols is the final step toward ensuring life-saving innovations move from luxury features to a mandatory baseline for the future of Indian mobility.
Sources
MORTH Road Accidents in India Publication 2016- 2023